Míriam Febrer and Josep Maria Font, from the BIOMEC Lab, have published the paper “Evaluation of Optimal Control Approaches for Predicting Active Knee-Ankle-Foot-Orthosis Motion for Individuals With Spinal Cord Injury” in the journal Frontiers in Neurobotics. This research has been carried out in collaboration with B.J. Fregly from the Rice Computational Biomechanics Lab (USA), within the framework of the HYBOR project and a Leonardo Grant for Researchers and Cultural Creators.
This study investigates whether use of a computational approach to personalize pre-defined knee trajectory parameters for an active knee-ankle-foot orthosis would be a better choice than the current trial-and-error approach. The investigation involves exploration of optimal control problem formulations that allow to simulate different pre-defined assistive knee angle trajectories, so that the best walking pattern for a specific individual with spinal cord injury can be identified.
The article is available using the following link.
Abstract
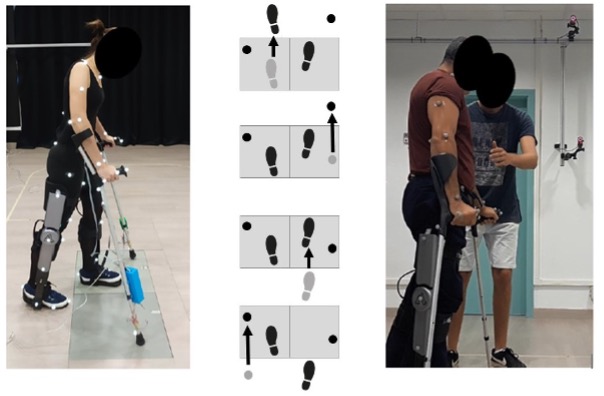
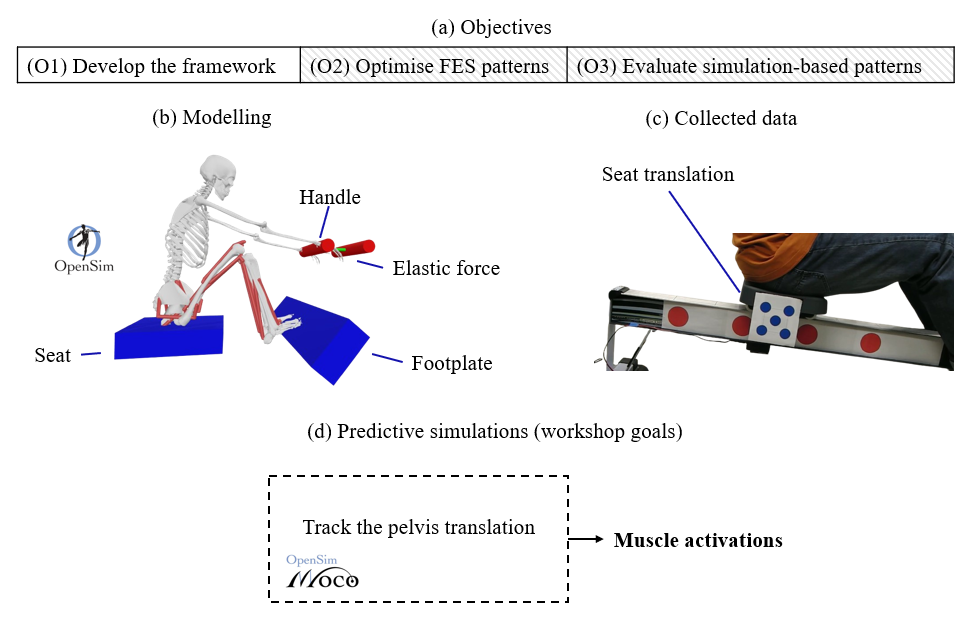
Gait restoration of individuals with spinal cord injury can be partially achieved using active orthoses or exoskeletons. To improve the walking ability of each patient as much as possible, it is important to personalize conveniently the parameters that define the device actuation, which may be different for each subject. This study investigates whether using a computational approach to personalize pre-defined knee trajectory parameters for an active knee-ankle-foot orthosis (KAFO) for spinal cord-injured (SCI) subjects could be used instead of the current trial-and-error approach. For that, we developed an optimal control-based predictive simulation approach to test different pre-defined knee angle trajectories of an active KAFO. We aimed to find the knee angle trajectory that produced an improved orthosis-assisted gait pattern compared to the one with passive supports (locked knee). We collected experimental data for a healthy subject assisted by crutches and KAFOs (with locked knee and with knee flexion assistance), and for an SCI subject assisted by crutches and KAFOs (with locked knee). First, we compared different cost functions and chose the one that produced results closer to experimental locked knee crutch-orthosis-assisted walking for the healthy subject. For this healthy subject, we predicted crutch-orthosis-assisted walking imposing a pre-defined knee angle trajectory for different maximum knee flexion parameter values, and results were evaluated against experimental data using that same pre-defined knee flexion trajectories in the real device. Finally, using the selected cost function, gait cycles for different knee flexion assistance were predicted for an SCI subject. We evaluated changes in four clinically relevant parameters: foot clearance, stride length, cadence and hip flexion ROM. Simulations for different values of maximum knee flexion showed variation on these parameters that were consistent with experimental data for the healthy subject, and were reasonable for the SCI subject. Although more research is needed before this method can be applied to choose optimal active orthosis controller parameters for a specific subject, these findings suggest that optimal control prediction of crutch-orthosis-assisted walking using biomechanical models might be used in place of the trial-and-error method to select the best maximum knee flexion angle during gait for a specific SCI subject.







Leave A Comment