Skip to content
ADALT: Activities of Daily Augmented Living ToolkitBIOMEC2019-01-25T08:24:50+01:00
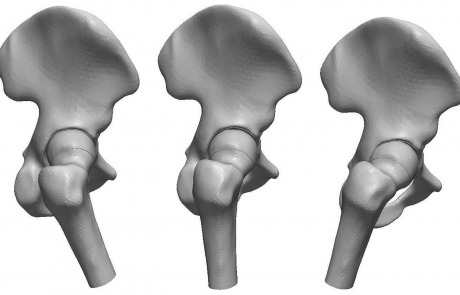
HIPART: Comparative study of postoperative gait in subjects with total hip arthroplastyBIOMEC2017-12-07T19:14:39+01:00
HYBOR: Low-cost motor-FES hybrid orthosis for the gait of spinal cord injured subjects and simulation methods to support the design and adaptationBIOMEC2017-12-07T19:13:18+01:00
RWECS: Race walking electronic control systemBIOMEC2017-12-10T09:06:35+01:00
Analysis of the body stability using biomechanical measurements. Comparison of two shoe modelsBIOMEC2017-12-10T09:08:57+01:00
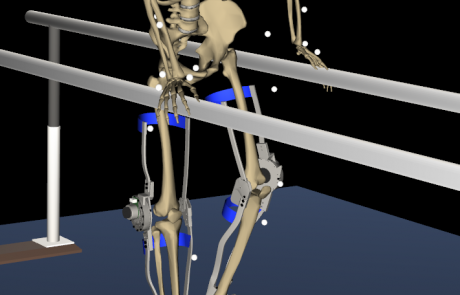
Design of an innovative gait-assistive active orthosis for incomplete spinal cord injured subjects based on motion analysis and prediction methods and complex musculoskeletal modelsBIOMEC2017-12-07T19:15:45+01:00
Determination of the critical variables that define comfort in footwearBIOMEC2017-12-10T09:11:06+01:00
Application of multibody dynamics techniques to active orthosis design for gait assistanceBIOMEC2017-11-29T17:32:04+01:00
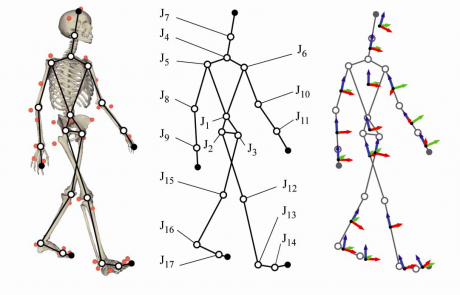
Biomechanics of human movement and multibody dynamicsBIOMEC2017-12-10T09:11:51+01:00